

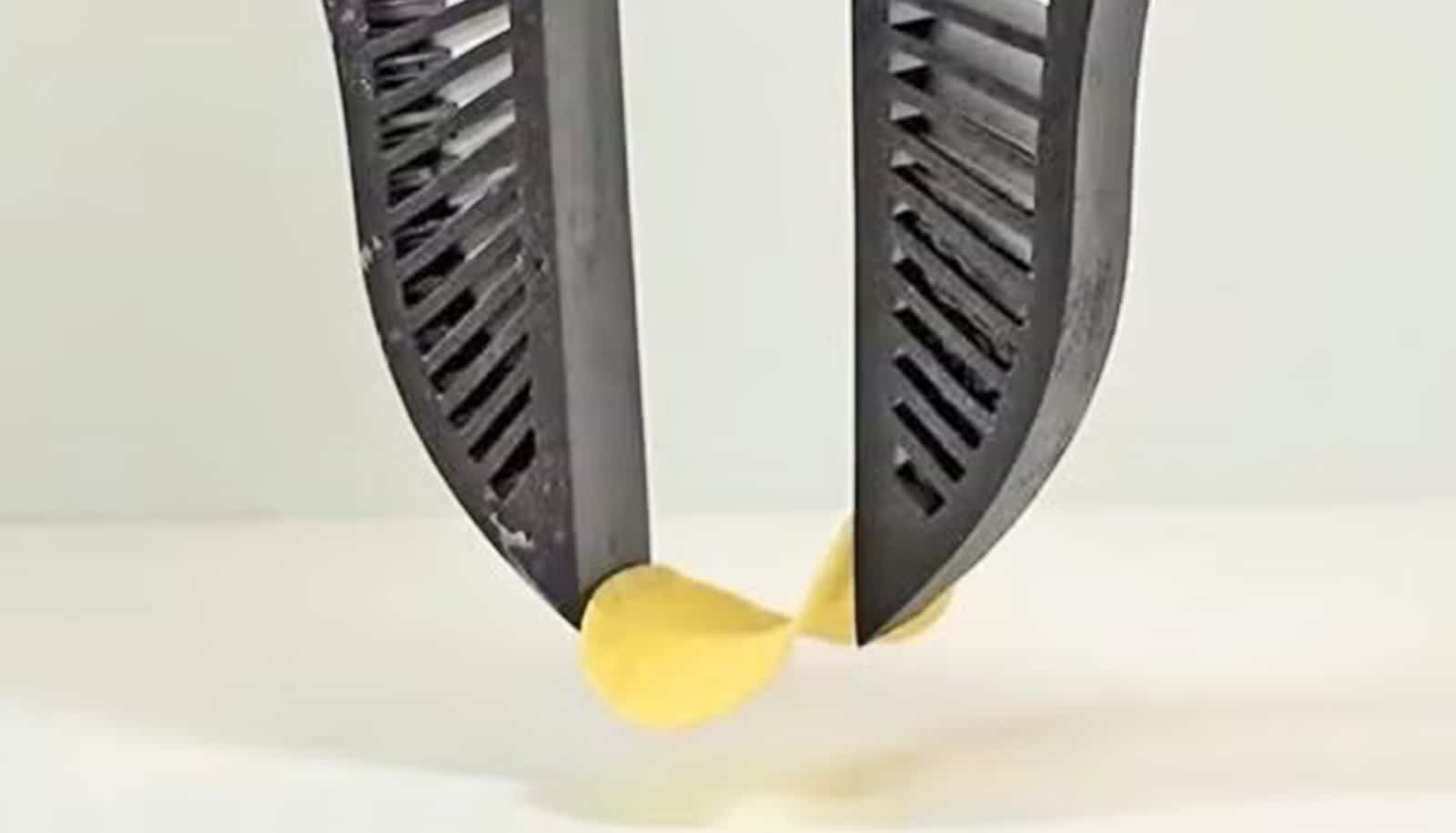
The technology, called Fragile Object Grasping with Tactile Sensing (FORTE), combines advanced tactile sensing with soft robotics.
The breakthrough could improve robot performance when a light touch is needed, such as in health care and manufacturing.
The GitHub is just a few md files?
source code: trust_me_bro.md